A5素材網 一站式產品設計公司網站模板資源庫
在當今數字化浪潮中,一個專業、美觀且功能強大的網站是產品設計公司展示實力、吸引客戶和建立品牌形象的核心門戶。對于許多初創團隊或尋求快速上線的公司而言,從零開始構建網站不僅耗時耗力,成本也往往居高不下。此時,高質量的網站模板便成為了高效且經濟的選擇。其中,A5素材網(通常指專注于網頁設計素材與模板的資源平臺)作為一個知名的資源集散地,為產品設計公司提供了豐富且優質的網站模板下載服務,成為眾多設計師和企業的得力助手。
一、 為何產品設計公司需要專業網站模板?
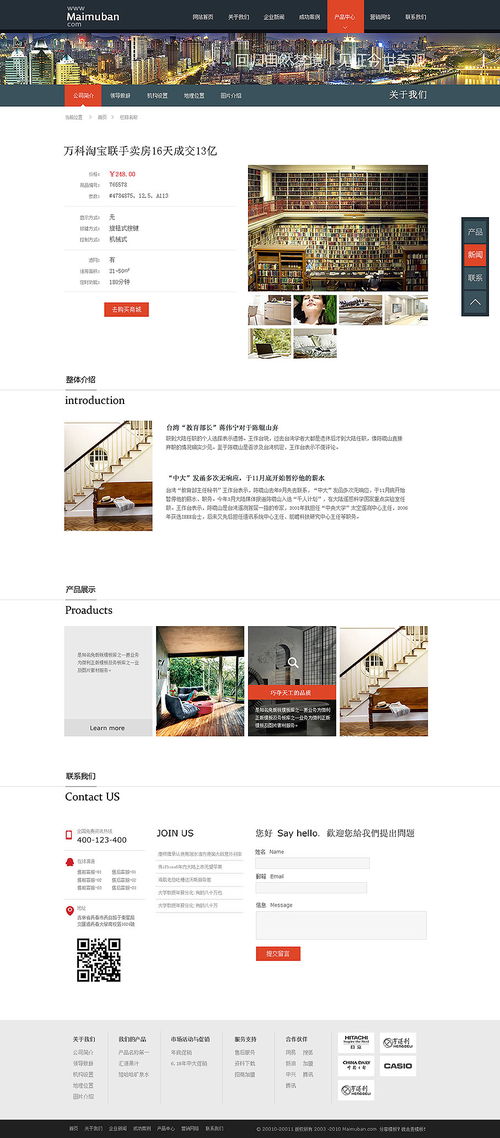
產品設計公司的業務核心是創新、美學與用戶體驗,其自身網站必須首先成為這些理念的實踐典范。一個專業的模板能快速搭建起符合行業特質的網站框架:
- 突出視覺與體驗:優秀的模板通常擁有簡潔現代的設計、合理的視覺層次以及流暢的交互,能瞬間傳遞公司的設計品味與專業度。
- 清晰的項目展示:模板會預設作品集、案例研究等板塊,方便公司結構化地展示設計流程、成果和客戶反饋。
- 強化品牌敘事:好的模板設計有助于講述公司故事、闡述設計理念和服務流程,建立情感連接與信任感。
- 響應式與高性能:確保網站在各種設備上都能完美呈現,并提供快速的加載速度,這對用戶體驗和搜索引擎優化至關重要。
二、 A5素材網:模板資源的寶庫
以“A5素材”為代表的資源平臺,匯聚了海量由專業設計師創作的網頁模板。對于尋找產品設計類模板的用戶而言,其優勢在于:
- 分類明確,精準查找:平臺通常設有“企業官網”、“設計機構”、“作品集”等精細分類,用戶能快速定位到適合產品設計公司的模板風格,如極簡風、工業風、創意交互風等。
- 質量參差,需仔細甄別:平臺資源豐富,但質量不一。高質量的模板往往具備完整的頁面(首頁、關于我們、服務、作品集、博客、聯系),代碼結構清晰規范,并附有詳細的使用說明。用戶在下載前應仔細預覽演示站,關注其設計細節、響應式效果和功能完整性。
- 格式多樣,兼容性強:提供的模板可能涵蓋HTML、WordPress主題、Bootstrap框架等多種格式,滿足不同技術棧的需求。產品設計公司可以根據自身技術能力或外包開發者的建議進行選擇。
- 成本效益高:相比定制開發,下載一個優質模板的成本極低,甚至有許多免費選擇,允許公司將更多預算投入核心業務與內容填充上。
三、 如何高效利用A5素材網的模板?
下載模板僅僅是第一步,使其真正成為公司的專屬門戶還需要進行精心調整:
- 深度定制化:切勿直接使用默認內容。務必替換所有的占位符圖片、文案和標識。將模板的配色、字體與公司的VI系統統一,注入獨特的品牌靈魂。
- 內容為王:重點打磨“作品集/案例”頁面。使用高清晰度的圖片、視頻,并配以詳細的設計背景、挑戰、解決方案和成果描述,生動展現公司的設計思維與價值。
- 功能優化:確保聯系表單、地圖集成、社交媒體鏈接等功能運作正常。考慮集成博客系統,定期分享設計見解、行業動態,提升網站的SEO表現和專業權威性。
- 技術檢查:在正式上線前,務必在多瀏覽器、多設備(手機、平板、電腦)上進行全面測試,確保所有交互和布局均完美無瑕。
四、 注意事項與建議
- 版權與許可:下載時務必確認模板的授權范圍,特別是用于商業項目時,避免侵權風險。
- 選擇信譽來源:優先選擇平臺內評分高、下載量大、有用戶評論的模板,或直接尋找知名獨立設計師/工作室發布的資源。
- 考慮長遠維護:選擇代碼結構良好、文檔齊全的模板,便于后續的功能擴展或二次開發。
總而言之,對于追求效率與效果的產品設計公司而言,從A5素材網這類平臺下載一個高起點、專業化的網站模板,是一條快速建立強大在線形象的捷徑。關鍵在于,要超越“模板”的局限,通過深度的品牌定制和優質內容填充,將其轉化為真正能夠代表公司設計實力與獨特氣質的數字名片。
如若轉載,請注明出處:http://www.qingrenba.cn/product/64.html
更新時間:2026-06-19 10:56:45